2008-10-11T09:01:00.011+02:00
 In previous posting I have posed the following sceanario:
Given the simple application shown below:
In previous posting I have posed the following sceanario:
Given the simple application shown below:
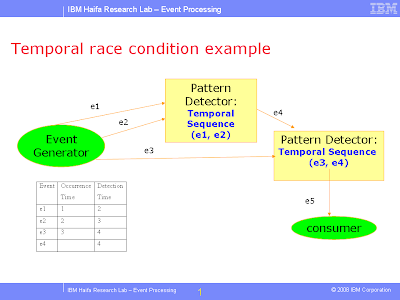
- There is a single event source (so no clock synchronization issues) which generates events of three types e1, e2, e3.
- Let's also say that in our story there is a single events of each type that is published (so no synonyms issues), the table shows their occurrence time (when they occurred in reality) and detection time (when they have been reported to the system) - each of them has been reported 1 time unit after its occurrence, no re-ordering problem.
- Events e1, e2 serve as an input to an EPA of type "pattern detection" which detects a temporal sequence pattern "e1 before e2", and when this is detected, it derives an event e4 - some function of e1 and e2.
- Events e3 (raw event) and e4 (derived event) serve as input to another EPA of type "pattern detection" which again detects a temporal sequences pattern "e3 before e4", if this pattern is detected - create event e5 which triggers some action in the consumer.
- The detection time semantics is implemented in various languages and means that the temporal order is the order of the time-stamps in which the "event processing platform" detects that this event occurs; if there is a single thread of such detection, then the events are totally ordered, otherwise, there may be several events with the same "detection timestamp".
- The occurrence time semantics also implemented in various languages means that the temporal order is the order of the time-stamps that are provided as part of the event information, and designate - when this event happend in reality. There are some complexity of synchronization of time in multi-producer environment, however, in this example we assume a single producer (I'll write about multi-producer cases in another posting).
- Note that this two order relations may not be identical.
- There is also kind of hybrid solution ("total order semantics") -- the semantics is really "detection time" semantics, but in order to allow events that arrive a bit late to take their proper role, the events are queued at a buffer (and not considered as detected) until time-out to let "out of order" events to arrive and re-order the buffer, and then send the events according to the buffer order.
- In the derived event case the occurrence time = detection time, since this event is not real event but a virtual one, thus, its source is the EPA that creates it, and it occurred when created. In our case it means that occurence-time (e4) = 4.
- Its occurence time is the occurrence time of the last event that completed the pattern - since the participating events in the creation of e4 are {e1, e2} and e2 was the last that completed the pattern, occurrence-time (e4) = occurrence-time (e2) = 2
- Interval semantics: The event e4 occurs in the interval in which all the participants occur, which is this case means occurrence-time (e4) = [1, 2].
- According to "detection time" semantics -- both have detection-time of 4. As such the sequence condition is not satisfied. However, if we impose total order by a single thread, this may create race conditions between the two events. In this case it is recommended to use a consistent priority policy - either breadth first (the raw event always comes first) or depth first (the derived event always comes first) to ensure deterministic result.
- According to the "occurence time" -- it depends on the policy chosen, but according to all interprerations - e4 occurs before e3 - thus the temporal sequence is not satisfied.
- The temporal semantics is detection time
- It is implemented by total order
- The total order policy is "breadth first" - namely priority for the raw events.


